728x90
* 본 포스팅은 개인 공부를 위해 작성하였으며, 주로 "다크프로그래머"님의 블로그를 기반으로 다른 여러 가지 문헌을 참조하여 작성되었음을 미리 알려드립니다.
핀홀 모델에서의 Focal Length
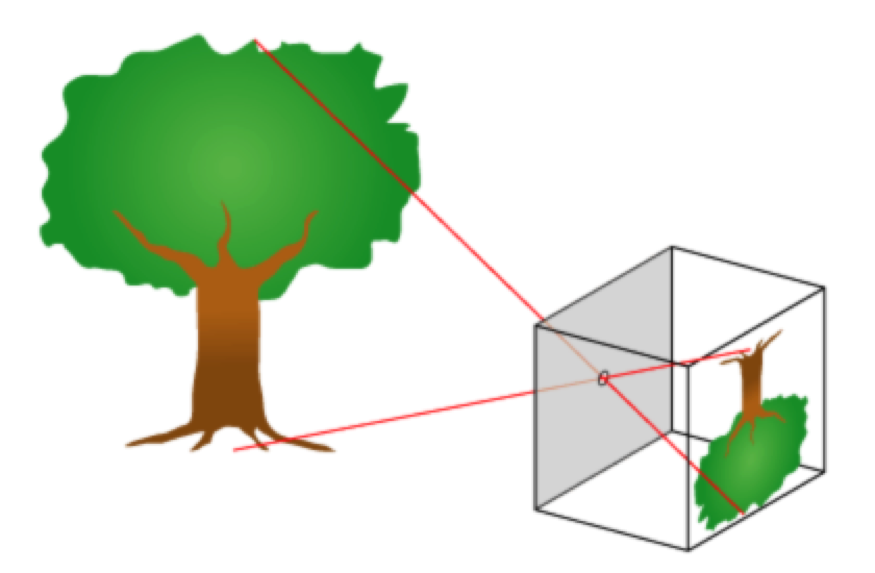
핀홀 카메라 모델
구성: 구멍뚫린 상자
상자에 작은 구멍을 뚫어 외부의 object가 바늘 구멍을 직선으로 통과하여 상자의 내벽에 상을 맺히게 하는 것.
Focal length
Hole에서부터 image가 맺히는 곳까지의 거리
카메라 모델에서의 Focal Length

카메라 모델
구성: 카메라 렌즈, 이미지 센서
핀홀은 렌즈의 중심과 대응됨 (빛이 직선으로 지나는 지점)
Focal Length
렌즈중심에서 이미지 센서까지의 거리
모든 방향으로 퍼져나가는 빛(빨간빛 또는 파란빛)은 렌즈를 지나면서 굴절되고, 렌즈를 지나 한 곳으로 모입니다. 이곳에 이미지센서를 위치시키면 선명한 상을 얻을 수 있습니다(정확하게 일치시키지 않으면 Blurring 이미지가 생성됨). 즉, 카메라 렌즈를 돌려서 상을 선명하게 만드는 작업은 렌즈의 위치를 이동시켜 빛이 모이는 지점과 이미지센서의 위치를 일치시키는 작업이라고 생각하시면 됩니다.
[1] https://darkpgmr.tistory.com/107
[2] https://namu.wiki/w/%ED%95%80%ED%99%80%20%EC%B9%B4%EB%A9%94%EB%9D%BC
반응형
'Robotics > Vision' 카테고리의 다른 글
| [비전 #3] 카메라 좌표계 (Coordinate) (0) | 2020.09.11 |
|---|---|
| [비전 #2] 카메라 모델 (Camera model: Intrinsic parameter) (0) | 2020.09.04 |
| [Feature extraction #1] SIFT 알고리즘 (0) | 2020.07.29 |

